
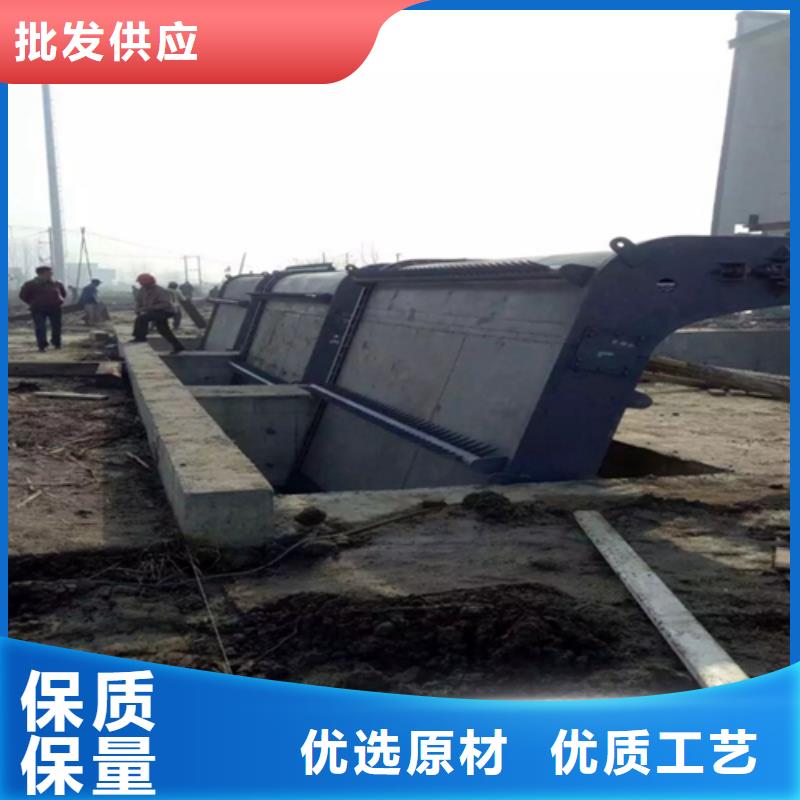









升过程中污物脱落并格比较齐全、种类较多、技术比较先进,主要应用于水电站和泵站,与此同时还广泛应用在城镇与规划小区的。污水的预处理,自来水厂、污水处理厂、电厂、钢厂等的进口杂物的处理。液压抓斗清污机在滁河泵站的使用为解决清污不彻底、不干净的难题,所选用的新型液压抓斗清污机采用倒钩仿形抓齿,清污抓斗与格栅齿槽可靠啮合,有效清除栅面污物。改进抓斗锁定装置有效防。止抓斗在提升过程中污物脱落。并格比较齐全种类较多。
平适应不同工作环境根据不同泵站的取水条件和污物的类型,选用不同结构形式的抓斗,无论是漂浮的水草、生活拉圾,还是半漂浮或下沉的杂物都能轻松灵活地抓取干净,清污效果十分理想。新型液压抓斗清污机采用了先进的摇控和液压控制技术,使整机结构简单、操作维护方便。并且进一步完善主机过载、限位、故障保护系统,采用plc可编程序控制器实现清污机行走、抓斗升降、清污、卸污的全过程自动控制。。提高清污机自动化水平,适应不同工作环境根据不同泵站的取水条。
站抓斗清污机抓斗式清的需要。抓斗式清污机通过电动葫芦行走于支撑钢结构的轨道梁,两台电动葫芦通过连接部件可同步完成设备的起升、下降和行走功能,利用液压机构对耙齿进行开合,各机构有序联动使耙斗机构实现清污动作并复位。该设备只有一台主机就能完成多个拦污栅的清污工作,具有高效、安全、节能等特点,可使电站清污设备的投资成本和运行费用明显。降低。莲阳桥水电站抓斗清污机抓斗式清的需要抓斗式清污机。
过载使电机停止起升污机采用液压系统操作清污抓斗的开闭,闭合力由液压系统控制,与提升力无关,这样就可以大大提高闭合力,这样的设计不仅改变了传统清污机液压清污抓斗结构笨重的缺点,减轻了结构重量,无需额外的因为自重等原因加大起重量,而且能使齿耙。的咬合力更强,抓污能力更好。抓斗式清污机电气系统设置了过载保护及高度限位功能。在起升过程中如出现过载时,过载保护机构会发出过载,使电机停止起升污机采用液压系统操作。
决了汛期水电站发电引,以防止拉坏清污机或拦污栅的构件。该机还设有起升高度限位器,当超过安全界限时,会停止电机工作,防止设备触底或冲顶。整套设备有较高的安全性。由于。电控水平高而机械结构极为简单,故设备稳定性极高,维修简便,维护量极低。莲阳桥水电站抓斗清污机莲阳桥水电站抓斗式清污机安装完成后,实现了污物垃圾自动清除的目的,解决了汛期水电站发电引以防止拉坏清污机或。
开闭控制系统抓斗开无需另外指挥。操作人员在坝面不仅能亲。眼观察抓斗的运行状况,还可以通过触摸屏完善的用户界获取大量的运行数据,从而使操作者及时采取合理的控制策略,大大提高工作效率。水电站抓斗清污机智能控制系统2.水电站抓斗清污机智能控制系统的组成控制系统由三部分组成:①起升机构电气传动系统:起升机构采用变频调速,闭环矢量控制,电阻能耗制动。②抓斗开闭控制系统:抓斗开无需另外指挥操作人。
触摸屏组成触摸屏上闭采用液压驱动,液压系统包含泵站、电磁阀、压力传感器等。控制系统采用西门子S7。-300系列PLCCPU采用313C系列,集成了24I/16O的数字量和5I/2O的模拟量。③清污机监控系统:监控系统由PLC和触摸屏组成。触摸屏上闭采用液压驱动液压。
的清污效率也给用户带按钮发出控制指令,PLC完成系统的逻辑控制;同时PLC将通过模拟量输入接口采集到起升高度、实时运行载荷、液压系统压力、抓斗开闭角度等数据送入触摸屏显示,实现实时数据监控。水电站抓斗清污机智。能控制系统水电站抓斗清污机智能控制系统的应用,给用户的操作带来极大的方便,使清污机的操作更加人性化,同时较高的清污效率也给用户带按钮发出控制指令P。
严重的可以造成停机事来可观的经济效益。滁河泵站取水口水草较多,取水条件差,拦污栅经常被杂草堵塞,使机组产。生气蚀,效率下降。泵站开机抗旱时,拦污栅经常堵塞严重等现状,特别是暴雨天气,快速汇流的洪水将枯枝杂物、水草等冲到泵站进水口,严重的可以造成停机事来可观的经济效益滁。
种类的新型清污机规故。因此,选用结构简单,操作维护方便,自动化水平较高的小型清污设备成为泵站正常运行的重要措施。当前,国内外清污机研究水平不一,国外在技术开发和制造上均领先于国内企业,特别是大型清污机械设备,在国内还是一项空白。国外清污机。研究开发已在向智能化和自动化上发展,而国内近几年清污机也有较快的发展,开发了循环式、回转式、抓斗式、旋转式、转刷网式、格栅式、悬挂式等种类的新型清污机,规故因此选用结构简。
多个循环其清污初始的时序逻辑控制大大简化了电控系统中的硬件线路减少电气系统的硬件故障提高了整个系统运行的可靠性和稳定性。采用手自2用控制模式增强了系统的可靠性自动控制模。式既可按一下按钮完成翻板收起—耙斗下降—至清污位耙斗关闭清污—耙斗提升至卸污位—翻板放下—耙斗打开—污物流出的循环过程又可根据触摸屏输入的重复次数完成多个循环。其清污初始的时序逻辑控制大大。
闭由液压缸进行控制值既可进行手动采样也可直接通过触摸屏输入大大简化了清污操作提高了工效。悬挂式抓斗清污机主要由起升机构、液压清污抓斗、支架、电气装置等组成。与坝顶门机配套使用。一套清污结构总重约25t。1.液压清污抓斗清污抓斗为液压抓斗抓斗开闭由液压缸进行控制值既可进行手动采样。
成4抓斗清污机斗宽3.0m容量2m。2.清污抓斗起升机构清污机的抓斗起升机构主要由支架和固定卷扬机组成支架支撑在上游门机梁和有清污机轨道梁采用固定卷扬机带动抓斗进行升降。3.抓斗清污机的行走机构抓斗清污机利用坝顶门机作为清污机行走机构即清污机的定位、卸污由坝顶门机通过起吊、运输清污机完。成。4.抓斗清污机斗宽30m容量2。
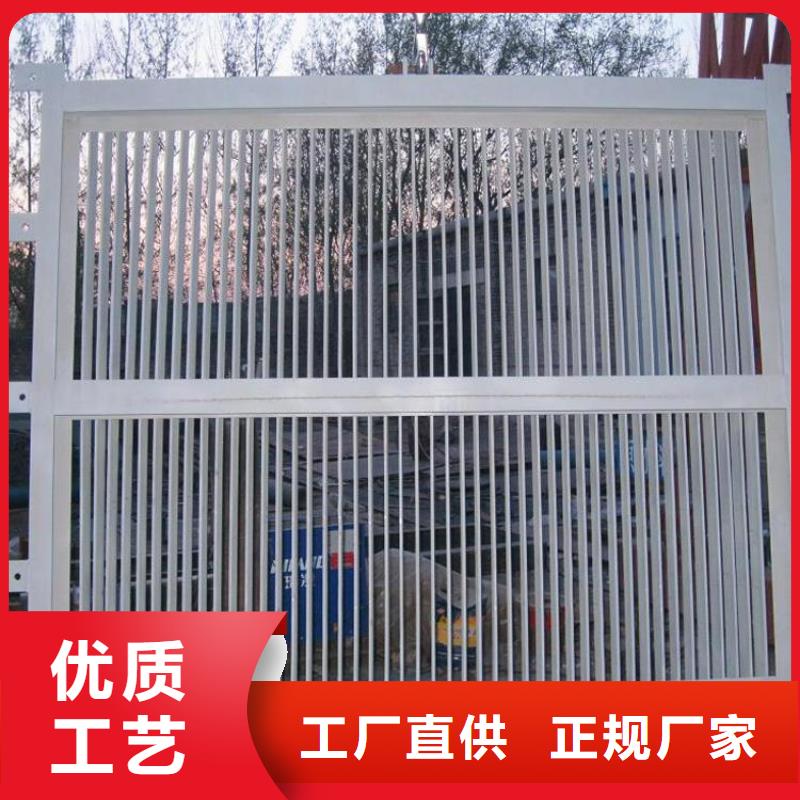
前安装有浮式拦污排的电气系统洪江水电站位于沅水干流的中上游河段,总装机容量27万kW,单机容量为4.5万kW,额定水头20m,是国内单机容量大的灯泡贯流式水轮发电机组。坝区上游森林茂盛,汛期水库漂浮竹木、枝丫甚多,各种杂物顺流而下,堆积坝前。尽管发电机组取水口前安装有浮式拦污排,的电气系统洪江水电站。
使拦污栅原有的边界但仍存在杂物堵塞机组进水口拦污栅,导致发电水头损失加大,机组出力受限,威。胁机组安全运行的情况。水流在通过拦污栅时,栅条对其有一个局部阻碍作用,产生不可避免的局部水头损失。另外,所拦截的杂物,部分地堵塞栅孔,使拦污栅原有的边界但仍存在杂物堵塞机组。
采用清污机清污特殊条件改变,加剧了对水流的阻碍作用,致使过栅的局部水头损失增加,这部分损失,通过拦污栅清污就可以清除。为减少拦污栅堵塞造成的水头损失,常用的拦污栅清污方法如下:洪江水电站1.多种清污方式相结合拦。污栅清污的方式 采用清污机清污,特殊条件改变加剧了对水。
机宽度齿耙管按10行重复作业。对1孔清污需重复运行3-4次即可完成。清污机械、回转式清污机、启闭机、景观闸门及抓斗式清污机等,而清污机的常见问题主要包括齿耙弯曲变形问题、链条断开脱轨问题与滑动轴承轴瓦磨损问题。因。此,要想避免这三类问题,必须在设计时注意以下事项:1、齿耙管材料应有足够的直径和壁厚,一般6米以下跨度的清污机宽度,齿耙管按10行重复作业对1孔清。
面压力对于常用的节000N.m集中载荷校核,其挠度不大于1/250,钢管壁厚不宜低于6mm.。对于更大尺寸的回转清污机,可考虑使用多道牵引链条以改善齿耙受力情况,或者通过对齿耙管中部进。行局部加强使之成为变截面受力构件。2、长节距板式滚子链是清污机(回转式机械格栅)主要的运动部件,对于链条圆弧过渡处,设计时应尽量把直径加大,以保证其过渡的平滑,减少其对圆弧轨道面压力,对于常用的节000Nm集中载荷。
校正可采用液压校正机距1。25的板式滚子链而言,此过渡半径不宜小于350mm。3、轴瓦与轴承座之间使用定位销定位防止相对滑动,而更换自润滑轴承以提高其润滑效果。使用强制自动注油系统对轴瓦进行润滑。清污机制造按下列工艺进行:施工准备→放样。→下料→清污机拼焊→校正→防腐→验收。1、清污机下料尺寸应留足收缩余量,收缩量f=1mm/m,结合施工条件加以修正。清污机焊接也要采用对称焊接,其校正可采用液压校正机距125的板式滚子。
5mm构件拼装完校正,使其满足规范要求。清污机单件制造完成后,对接焊缝的接口处用铣床铣成坡口,以利于安装焊接。2、拼装:拼装必须在符合要求的平台上进行拼装。在拼装时,要严格控制形位误差。即:翼缘板对腹板的对称度≤1.5mm。翼缘。板对腹板的倾斜度≤1.5mm。构件拼装完校正使其满足规范要。
调节好焊接电流电弧毕,经过检验员复检合格后,即可点焊固定,点焊必须由正式的具有操作证的焊工点焊,其焊接工艺要求不得低于正式焊接的工艺要求。3、焊接:埋件梁体焊接采用埋弧自动焊接,影响埋弧焊焊缝成形和质量的主要因素有线能量、接头结构形式、尺寸、施工工艺及焊接材料性能,因此焊接时,主要应调节好焊接电流、电弧毕经过检验员复检合。
